Magnetic Compass Errors Revisited - Wingsail Angle Sensor/Magnetic Disk
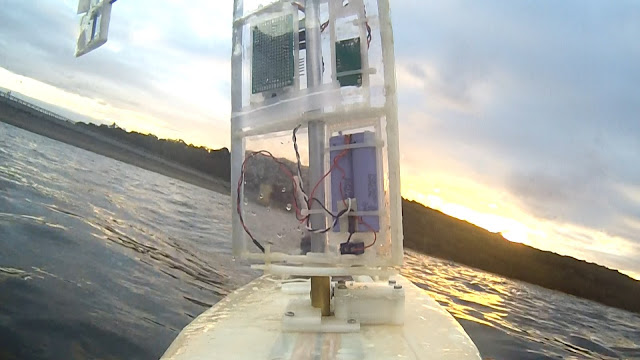
The Wingsail Angle Sensor incorporates a magnetic disk. Its located around 300mm from the Magnetic Compass. I thought this was a reasonable distance, but perhaps its interfering with compass. |
| Wingsail Angle Sensor Magnetic Disk |
I set up a test to measure compass error versus wingsail angle and plotted the results.
They were bad.
The plotted results below, show that the wingsail angle is responsible for large errors of around 25 to 35 degrees with a wingsail angle of 45 degrees.
Negative wingsail angle represents port tack.

The image below shows a successful completion of a course of waypoints, with a northerly wind
The reaching leg across the top of the course shows the vessel heading about 30 degrees to port of the desired course. It is pointing higher than necessary by about 30 degrees, due to compass error.
This is consistent with the measurements recorded in the graph above.
On the port tack the error is about +30 degrees.
Hence the vessel must reduce the heading angle by about 30 degrees to maintain the desired magnetic course.
Hence, in this case, on the reaching leg, it is steering about 30 degrees to port.
 |
| Course Demonstrating Compass Error |
Conclusions:
It will be difficult to increase the separation between the magnetic compass and the magnetic disk on the wingsail on a vessel of this size (1.2m LOA).It is likely that the wingsail magnetic disk is unnecessarily large and strong. So it will be necessary to test a smaller disk with a reduced number of magnets, to reduce the field strength, yet still maintain reliable operation of the wingsail angle sensor.
Note: This is part of the ongoing development of a low cost autonomous oceangoing sailing drones, utilising a self-trimming wingsail. This is the Voyager series of sailing drones.












{kind=link}
{kind=link}
{kind=link}